谐波行星无框机器人关节电机
谐波关节电机
鸿磐谐波关节电机具有高精度、高扭矩和大中空孔径等特点,通常可为受限空间内的应用提供解决方案。支持定制,并且这些电机常用于特种机器人领域。
 带 STO 的高精度编码器机器人谐波齿轮电机HAG 机器人谐波齿轮电机是专为机器人应用设计的机器人关节执行器。内置驱动器集成在齿轮电机底部,并配备高精度编码器——高速端分辨率为 20 位,输出端为 19 位——可实现全闭环控制。可选配 STO 和制动功能,确保设备运行更安全。详情
带 STO 的高精度编码器机器人谐波齿轮电机HAG 机器人谐波齿轮电机是专为机器人应用设计的机器人关节执行器。内置驱动器集成在齿轮电机底部,并配备高精度编码器——高速端分辨率为 20 位,输出端为 19 位——可实现全闭环控制。可选配 STO 和制动功能,确保设备运行更安全。详情 带扭矩传感器快速连接的谐波关节模组TCHL 谐波关节模组是一款将扭矩传感器直接集成到谐波减速机中的谐波关节模组。扭矩传感器可精确测量驱动系统的运行状态和所需扭矩值,从而实现执行器的精确负载检测。这有助于防止过载,并实现更安全的人机交互。
带扭矩传感器快速连接的谐波关节模组TCHL 谐波关节模组是一款将扭矩传感器直接集成到谐波减速机中的谐波关节模组。扭矩传感器可精确测量驱动系统的运行状态和所需扭矩值,从而实现执行器的精确负载检测。这有助于防止过载,并实现更安全的人机交互。
该模组采用线缆和连接器全集成设计,可实现快速、精准的部件连接,并通过高度集成化设计实现安全、灵敏的运动控制。详情 协作机器人机械臂谐波T型一体化关节模组T型谐波关节模组是一种高度集成的机器人关节模组,集成了谐波减速机、力矩电机、高精度传感器、制动器和驱动器。之所以称为“T型”,是因为输出法兰与电机轴垂直,形成T形布局,非常适合机器人旋转关节。
协作机器人机械臂谐波T型一体化关节模组T型谐波关节模组是一种高度集成的机器人关节模组,集成了谐波减速机、力矩电机、高精度传感器、制动器和驱动器。之所以称为“T型”,是因为输出法兰与电机轴垂直,形成T形布局,非常适合机器人旋转关节。
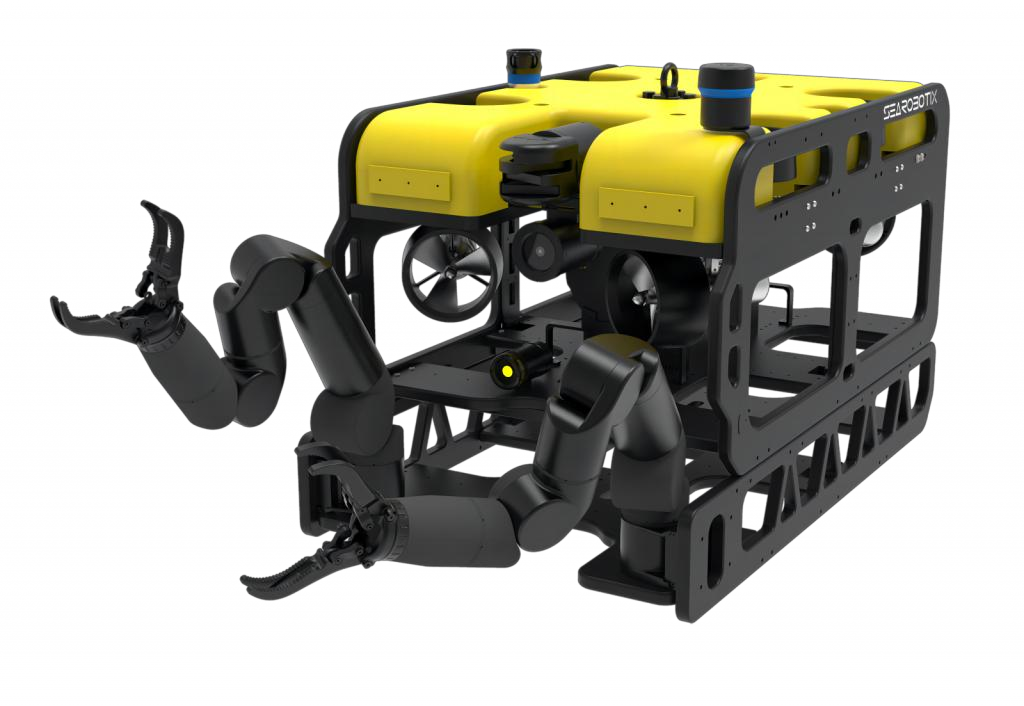
该模组专为协作机器人设计,通过将关键部件集成到一个紧凑的即插即用单元中,简化了开发过程。这大大缩短了开发周期,降低了成本,使机械臂的构建几乎像拼装乐高积木一样简单。其高度集成化还提升了维护效率,并拓展了机械臂技术的应用范围。详情 用于水下作业特种机器人的密封设计机器人关节模组该关节模组通过将谐波减速机、无框力矩电机、制动器、编码器和驱动器等组件完全集成,实现了体积和重量的高度优化,可提供更大的扭矩输出、更高的精度、更紧凑的尺寸和更轻的重量,从而实现精准运动控制。我们还提供定制化解决方案,以满足个性化应用和特殊作业环境的具体需求,最常见的定制包括防水版本(可抵抗水花飞溅、喷水或在水下 1 米深度内作业)和低温适配。该防水关节模组专为水下作业的特种机器人设计,是在我们的标准关节模组基础上开发的增强版本,针对机器人关节防水难题进行了专门改进。详情
用于水下作业特种机器人的密封设计机器人关节模组该关节模组通过将谐波减速机、无框力矩电机、制动器、编码器和驱动器等组件完全集成,实现了体积和重量的高度优化,可提供更大的扭矩输出、更高的精度、更紧凑的尺寸和更轻的重量,从而实现精准运动控制。我们还提供定制化解决方案,以满足个性化应用和特殊作业环境的具体需求,最常见的定制包括防水版本(可抵抗水花飞溅、喷水或在水下 1 米深度内作业)和低温适配。该防水关节模组专为水下作业的特种机器人设计,是在我们的标准关节模组基础上开发的增强版本,针对机器人关节防水难题进行了专门改进。详情 紧凑型高扭矩谐波减速机机器人关节电机机器人关节电机通过集成谐波减速机、无框力矩电机、制动器、编码器和驱动单元等组件,实现高精度运动控制,并在尺寸和重量方面进行了优化。其具备更大的扭矩、更高的精度、更紧凑的尺寸和更轻的重量。我们还可根据客户的具体要求提供定制服务。
紧凑型高扭矩谐波减速机机器人关节电机机器人关节电机通过集成谐波减速机、无框力矩电机、制动器、编码器和驱动单元等组件,实现高精度运动控制,并在尺寸和重量方面进行了优化。其具备更大的扭矩、更高的精度、更紧凑的尺寸和更轻的重量。我们还可根据客户的具体要求提供定制服务。
机器人关节电机通常支持宽电压范围的 DC24V~DC48V。作为机器人行业的核心部件,机器人关节电机的技术进步将持续推动专用机器人和人形机器人向更高灵活性及更广泛应用场景发展。除机器人领域外,机器人关节电机还应用于半导体设备、光伏设备、精密医疗设备、3C设备、光学设备及其他领域。详情





行星关节电机
行星关节电机也是机器人动力系统的核心部件。与谐波关节模组相比,它具有更小的减速比、更高的输出转速和更大的刚性,但整体输出精度略低。通过高度集成行星减速器、无框力矩电机、制动器、编码器和驱动器等组件,其尺寸和重量得到显著优化,从而实现精确的关节运动控制。由此带来更高的扭矩、更紧凑的尺寸和更轻的重量。行星关节电机通常支持较宽的电压范围,可适配低压直流 24V~48V。我们还可根据客户的个性化需求提供定制化解决方案。
 重型防爆机器人狗行星关节执行器HONPINE’s heavy-duty explosion-proof planetary joint actuators have officially entered mass production. This series of joints has been successfully integrated into multiple quadruped robot (robotic dog) platforms and deployed in hazardous environments such as petrochemical plants, natural gas inspection sites, and emergency rescue operations—areas that previously relied heavily on manual labor or imported components.
重型防爆机器人狗行星关节执行器HONPINE’s heavy-duty explosion-proof planetary joint actuators have officially entered mass production. This series of joints has been successfully integrated into multiple quadruped robot (robotic dog) platforms and deployed in hazardous environments such as petrochemical plants, natural gas inspection sites, and emergency rescue operations—areas that previously relied heavily on manual labor or imported components.
Application-Specific Integration Support: Customized mechanical structures and control parameters tailored to different robot configurations and mission requirements.
Explosion-Proof Certification Assistance: Support throughout the certification process, helping customers avoid common design pitfalls and accelerate compliance.
Rapid Technical Support: Technical service centers located across major industrial regions nationwide, providing on-site response within 48 hours.详情 高扭矩输出轻量化行星关节模组HONPINE PA系列行星关节模组拥有三项独家发明专利和七项实用新型专利。凭借巧妙的结构设计,其在同类产品中可实现最高扭矩输出,提供强劲且稳定的性能。
高扭矩输出轻量化行星关节模组HONPINE PA系列行星关节模组拥有三项独家发明专利和七项实用新型专利。凭借巧妙的结构设计,其在同类产品中可实现最高扭矩输出,提供强劲且稳定的性能。
HONPINE提供丰富的产品资源和技术支持,可在各种应用场景中实现快速部署,同时显著减少项目预研阶段所需的时间、精力和成本。
该模块采用动力与信号共享输入/输出设计,大幅简化了驱动单元之间的连接。结合中空贯穿式布线结构,驱动单元的应用与集成更加便捷高效。详情 高速抗冲击紧凑轻量化行星关节模组标准行星关节模组是机器人动力系统的核心部件。通过将行星减速机、无框力矩电机、制动器、编码器和驱动器进行高度集成化设计,实现了体积和重量的显著优化,从而实现关节的精确运动控制。由此带来更大的扭矩、更小的尺寸和更轻的重量。与谐波关节模组相比,行星关节模组具有更小的减速比、更高的输出转速和更大的扭矩密度,因此更适用于中低负载应用。我们还提供可根据客户具体需求量身定制的定制化服务。
高速抗冲击紧凑轻量化行星关节模组标准行星关节模组是机器人动力系统的核心部件。通过将行星减速机、无框力矩电机、制动器、编码器和驱动器进行高度集成化设计,实现了体积和重量的显著优化,从而实现关节的精确运动控制。由此带来更大的扭矩、更小的尺寸和更轻的重量。与谐波关节模组相比,行星关节模组具有更小的减速比、更高的输出转速和更大的扭矩密度,因此更适用于中低负载应用。我们还提供可根据客户具体需求量身定制的定制化服务。
凭借高速性能、抗冲击性以及紧凑轻量化设计等核心优势,标准行星关节模组已成为人形机器人、特种机器人、物流AGV和工业自动化中高负载驱动的首选方案,推动机器人性能提升和更广泛的应用场景拓展。详情



无框力矩电机
无框力矩电机是一种特殊类型的永磁同步电机 (PMSM),由转子和定子两大核心部件组成,同时去除了传统电机的外壳、轴承和轴等结构。其设计用于直接集成到客户的机械系统中,因此需要终端用户自行提供配套轴承和外壳。这一设计理念带来了更高的灵活性、更紧凑的尺寸和更优异的性能,使其非常适用于对空间、重量和动态性能有严格要求的应用。它在高精度、高动态响应场景中表现出色,包括人形机器人关节驱动、精密旋转平台、医疗设备和工业自动化系统。根据结构配置不同,无框力矩电机进一步分为内转子无框电机和外转子无框电机。
 FM2 机器人用高扭矩密度无框电机HONPINE FM2机器人用无框力矩电机相比FM1系列提供更高性能和更多配置选项, 适用于更广泛的应用。与FM1电机相比, 电机损耗降低20%, 转矩输出提高10%, 从而延长运行续航时间。
FM2 机器人用高扭矩密度无框电机HONPINE FM2机器人用无框力矩电机相比FM1系列提供更高性能和更多配置选项, 适用于更广泛的应用。与FM1电机相比, 电机损耗降低20%, 转矩输出提高10%, 从而延长运行续航时间。
FM2系列提供六种直径规格, 范围从φ50mm到φ127mm, 额定转速从1800 rpm到5500 rpm, 转矩范围从0.36 Nm到6.40 Nm, 功率输出从207 W到608 W。额定电压范围从24 V到70 V。可选配置包括霍尔传感器, 温度传感器, 以及可定制引出线选项。这些电机广泛应用于协作机器人, 人形机器人, 四足机器人, 工业机器人, 以及医疗康复机器人。详情 电机") FM1 高性价比无框无刷直流 (BLDC) 电机HONPINE FM1 无框无刷直流 (BLDC) 电机结构紧凑, 性能高, 且具有高性价比。提供四种尺寸 (φ50mm–φ115mm), 额定转速范围为 650 rpm 至 5250 rpm, 扭矩范围为 0.3 Nm 至 9.32 Nm, 功率范围为 165 W 至 920 W。额定电压范围为 24 V 至 70 V, 可选配霍尔传感器, 温度传感器和接线配置。它们广泛应用于协作机器人, 人形机器人, 四足机器人和医疗康复机器人。详情
FM1 高性价比无框无刷直流 (BLDC) 电机HONPINE FM1 无框无刷直流 (BLDC) 电机结构紧凑, 性能高, 且具有高性价比。提供四种尺寸 (φ50mm–φ115mm), 额定转速范围为 650 rpm 至 5250 rpm, 扭矩范围为 0.3 Nm 至 9.32 Nm, 功率范围为 165 W 至 920 W。额定电压范围为 24 V 至 70 V, 可选配霍尔传感器, 温度传感器和接线配置。它们广泛应用于协作机器人, 人形机器人, 四足机器人和医疗康复机器人。详情 FMK 高度集成机器人关节无框力矩电机无框力矩电机不同于传统伺服电机,仅由定子和转子组件组成.与带机壳电机相比,无框电机配置灵活,安装简便.考虑到高度集成驱动系统日益增长的趋势,无框电机更能满足工程师的期望.工程师在系统设计中不再需要考虑电机接口,从而最大限度地减少驱动系统中动力输出单元占用的空间,实现更高的系统集成度.HONPINE FMK 无框力矩电机现已广泛应用于协作机器人和双臂机器人的 J1–J6 关节,四足机器人的行走关节,以及人形机器人的柔性关节.详情
FMK 高度集成机器人关节无框力矩电机无框力矩电机不同于传统伺服电机,仅由定子和转子组件组成.与带机壳电机相比,无框电机配置灵活,安装简便.考虑到高度集成驱动系统日益增长的趋势,无框电机更能满足工程师的期望.工程师在系统设计中不再需要考虑电机接口,从而最大限度地减少驱动系统中动力输出单元占用的空间,实现更高的系统集成度.HONPINE FMK 无框力矩电机现已广泛应用于协作机器人和双臂机器人的 J1–J6 关节,四足机器人的行走关节,以及人形机器人的柔性关节.详情 机器人永磁内转子无框力矩电机内转子无框力矩电机是一种特殊类型的永磁同步电机 (PMSM),由两个核心部件组成:转子和定子。转子位于内部,而定子安装在外部。其创新设计取消了传统电机的机壳、轴承和轴,仅保留转子和定子组件。转子通常采用集成永磁体的环形结构,直接安装在负载轴上。定子由铜绕组和叠片组成,通过产生电磁力驱动转子旋转。这种结构通过高效的磁场相互作用实现力矩输出,非常适用于机器人关节和工业自动化等高精度应用。它能够直接驱动负载,最大限度减少机械传动损耗。详情
机器人永磁内转子无框力矩电机内转子无框力矩电机是一种特殊类型的永磁同步电机 (PMSM),由两个核心部件组成:转子和定子。转子位于内部,而定子安装在外部。其创新设计取消了传统电机的机壳、轴承和轴,仅保留转子和定子组件。转子通常采用集成永磁体的环形结构,直接安装在负载轴上。定子由铜绕组和叠片组成,通过产生电磁力驱动转子旋转。这种结构通过高效的磁场相互作用实现力矩输出,非常适用于机器人关节和工业自动化等高精度应用。它能够直接驱动负载,最大限度减少机械传动损耗。详情

 电机")


什么是谐波机器人关节电机?
谐波关节电机通过集成谐波传动、无框力矩电机、制动器、编码器和驱动单元等组件,实现高精度运动控制,并对尺寸和重量进行了优化。鸿磐谐波关节电机提供灵活的配置选项,以满足多样化的应用需求,包括双编码器、STO (安全扭矩关闭)、保持制动器和集成式扭矩传感器。

谐波机器人关节执行器选型
为满足多样化的市场需求,HONPINE谐波机器人关节电机目前分为三大系列:HPJM、TCHL和HAG。
本指南提供初步概览,帮助您根据成本控制、交期和基础性能需求等因素,为您的应用选择最合适的执行器。
如需详细选型和技术支持,欢迎随时联系我们进一步沟通。
核心特点
该系列已上市超过 5 年,提供成熟完善的人形机器人关节解决方案。集成谐波减速机、驱动器、编码器和无框力矩电机。可选双编码器和制动器。支持 CAN(专有)、CANopen 和 EtherCAT 通信协议。
核心优势
设计高度紧凑,在同等性能要求下可为系统集成预留更多空间
可选低温润滑脂,适用于低至 -40°C 的严苛环境
平均交期 ≤ 4 weeks,保障强大的生产能力
应用
非常适合需要稳定可靠性能、快速批量交付或在低温环境下运行的项目。
注意事项
该系列最初设计时未包含扭矩传感器或防水功能。如需此类特性,可提供定制,但预计会产生额外成本并延长交期。
核心特点
该新系列将于 2025 年底推出,采用自主研发的谐波减速机,可实现更好的成本控制。标配双编码器(单圈绝对值,23-bit 分辨率),支持 CAN FD 和 EtherCAT 通信协议。可选功能包括制动器和扭矩传感器。一体化端子线束支持中空轴穿线和模组级联。
核心优势
显著的成本优势
支持前装、侧装和后装安装方式,具有很高的结构灵活性
线束设计便于系统集成
应用
非常适合对成本敏感且对安装灵活性要求较高的项目。
注意事项
目前仅提供 101 减速比。完整减速比系列预计将于 2026 年 6 月推出。当前交期约为 6 weeks。
核心特点
该新系列将于 2026 年推出,配备 STO (安全扭矩关闭) 功能,以满足特定安全要求。采用国内领先品牌的谐波减速机,确保产品具有高可靠性。支持 CANopen 和 EtherCAT 通信协议,可选制动器和扭矩传感器。
核心优势
满足更高的安全标准
核心减速器部件性能优异、质量可靠
应用
非常适合具有明确安全要求或将减速器可靠性作为首要考虑因素的项目。
注意事项
作为新推出的系列,产能仍在爬坡中。当前交期约为 8–10 weeks。
机器人关节电机解决方案与应用
多年来,鸿磐已将谐波机器人关节电机和行星关节电机应用于多个领域,包括人形机器人、双臂机器人、轮式机器人、无人机、农业机械、核工业设备、工业机器人和工业自动化设备,并为这些行业提供关节电机解决方案与定制支持。其 HPJM、TCHL、HAG 等系列机器人关节电机均基于实际服务经验开发而成。
‹







›

谐波关节电机的优点和缺点是什么
谐波关节电机的优点
超高精度
传动回差极小,重复定位精度可达 ±0.01 mm,使其成为精密机器人操作中必不可少的部件。
高减速比
较大的单级减速比可使紧凑尺寸实现高扭矩输出,达到有效的“低速, 高负载”性能。

极其紧凑的设计
结构简单,体积小,重量轻,使其非常适用于手腕和手部等空间受限的机器人部件。
高度集成能力
通常以集成模块形式销售,结合电机、编码器和其他组件,便于安装和维护,同时支持模块化设计。
谐波关节电机的缺点
谐波关节电机的谐波减速机和扭矩传感器均为定制开发,因此很难降低价格。然而,在不久的将来,当需求和产能达到一定水平时,价格可能会下降。
谐波机器人关节模组 - 常见问题
鸿磐谐波直流关节电机是专为具身智能设计的谐波执行器。hpjm 是首款推出的谐波执行器,目前拥有最稳定的性能和最快的交付周期。为满足客户需求,我们近期新推出了两款谐波直流关节电机:TCHL 和 HAG。欢迎联系我们获取最新产品手册。
HONPINE谐波关节电机具有以下特点:
高扭矩输出
高精度
高减速比
结构紧凑
低噪音
低振动
它们特别适用于机器人手臂关节, 在这些部位, 对精度、力控制和轻量化设计有着极高的要求。
尽管来自行星齿轮系统和RV减速器的竞争日益加剧, 但在需要以下特性的应用中, 谐波驱动精密执行器系统仍然难以被取代:
零背隙或超低背隙
高定位精度
紧凑型集成设计
轻量化机器人关节
随着人形机器人对下肢关节提出更高的抗冲击能力要求, 行星减速器在髋部和腿部的应用正变得更加普遍. 然而, 谐波驱动机器人模块仍在对精度敏感的应用中占据主导地位, 例如机器人手臂, 腕部, 协作机器人, 医疗机器人和服务机器人.
行业的发展方向并不是一种技术取代另一种技术, 而是转向基于应用场景的传动系统选择, 使谐波, 行星和RV解决方案共存, 以针对不同机器人系统优化性能.
最新的机器人谐波执行器技术正聚焦于三大发展方向.
轻量化一体化结构
通过采用镁合金, 轻量化外壳和优化的机械布局, 制造商在缩短执行器长度的同时持续降低重量.
更高精度和更大功率密度
电机设计, 谐波减速器, 编码器分辨率和伺服算法的持续改进, 正在提升扭矩密度, 定位精度和动态响应.
可靠性提升
柔轮材料, 齿形优化, 热处理, 密封技术和润滑系统方面的进步, 显著提升了在严苛工业条件下的耐久性.
选择谐波减速机器人执行器模块需要评估关键性能因素, 包括扭矩密度, 重复定位精度, 控制架构, 机械设计, 通信能力和环境可靠性. 高扭矩密度可在降低整个系统重量的同时提升负载能力, 精密应用通常要求重复定位精度达到≤15–20 角秒. 先进模块通常采用双绝对值编码器闭环控制, 以补偿背隙和传动误差, 提高运动精度. 中空轴结构可实现内部走线, 以获得更好的集成度和可靠性. EtherCAT 和 CAN FD 等工业通信协议配合高频伺服控制, 可确保快速且稳定的性能. 此外, 可靠的执行器系统必须通过温度范围, 疲劳寿命, 过载, 冲击, 振动和 IP 防护等严格测试, 以确保长期工业稳定性.
尽管谐波传动执行器具有出色的精度, 但也存在一定的工程局限性.
抗冲击能力有限
柔轮持续发生弹性变形, 使谐波传动不太适合涉及频繁冲击的应用, 例如机器人跳跃, 奔跑或跌落.
扭转刚度较低
与行星齿轮箱或RV减速器相比, 谐波传动通常表现出较低的扭转刚度.
热管理挑战
高度集成的执行器设计减少了可用于散热的空间, 因此需要优化的冷却策略.
减速比限制
对于需要约35:1以下减速比的应用, 通常不建议使用谐波传动.
尽管谐波传动执行器具有出色的精度, 但也存在一定的工程局限性.
抗冲击能力有限
柔轮持续发生弹性变形, 使谐波传动不太适合涉及频繁冲击的应用, 例如机器人跳跃, 奔跑或跌落.
扭转刚度较低
与行星齿轮箱或RV减速器相比, 谐波传动通常表现出较低的扭转刚度.
热管理挑战
高度集成的执行器设计减少了可用于散热的空间, 因此需要优化的冷却策略.
减速比限制
对于需要约35:1以下减速比的应用, 通常不建议使用谐波传动.
高精度 多齿啮合可分散传动误差, 提供出色的定位精度和极低的回程间隙.
大减速比 单级减速比通常范围为 30:1 至 320:1, 定制设计可超过 1000:1.
紧凑尺寸 与传统齿轮箱相比, 紧凑型机器人关节模块在保持同等扭矩输出的同时, 尺寸显著更小.
高度集成 谐波传动一体化关节将电机, 减速器, 编码器, 制动器和控制器集成于一个紧凑封装中, 简化安装.
平稳运动 较低的齿面滑动速度可最大限度减少振动和冲击, 同时保持 69% 至 96% 的传动效率.
人形机器人的快速发展正在推动谐波机器人关节和机器人关节执行器的持续创新. 作为机器人肩部, 肘部, 腕部, 腰部和腿部的核心运动单元, 现代谐波执行器系统正变得更轻, 更紧凑, 更强劲. 先进设计在减轻重量和减少安装空间的同时, 提高了扭矩密度, 定位精度和运动性能. 同时, 优化的齿形, 高强度材料, 改进的润滑, 密封和热管理提升了耐久性, 抗冲击能力和使用寿命. 这些进步使人形机器人能够在工业, 服务和研究应用中实现更精确, 更可靠且更接近人类的运动.
机器人关节执行器是一种集成式运动控制单元,将谐波减速器,伺服电机,编码器,制动器,控制器和精密轴承组合到一个紧凑模块中。它也称为谐波传动集成执行器,机器人驱动关节模块,集成式机器人关节或机器人旋转执行器模块,是现代机器人的核心动力传动系统。
得益于其模块化架构,多个谐波齿轮关节模块可以组合用于构建具有多个自由度的机器人手臂,人形机器人,外骨骼,服务机器人和定制自动化设备。
小型型号广泛用于:相机云台,无人机和无人驾驶航空器,巡检机器人,医疗设备
大型型号非常适用于:工业机器人手臂,人形机器人,协作机器人,移动机器人,物流机器人
,专用机器人,数控自动化设备
是的. 它采用多圈绝对值编码器. 但是, 由于输出端带有减速齿轮, 需要编码器电池来保留多圈位置计数. 支持定制, 可选择电机带或不带编码器电池.
HONPINE谐波关节电机具有以下特点:
高扭矩输出
高精度
高减速比
结构紧凑
低噪音
低振动
它们特别适用于机器人手臂关节, 在这些部位, 对精度、力控制和轻量化设计有着极高的要求。
随着大规模制造能力的持续扩展和技术创新的不断推进, HONPINE不仅致力于提供可靠、可规模化生产且具有成本效益的产品, 还旨在加速人形机器人和具身智能机器人的产业化进程。
对于大多数型号,HONPINE 可以将交货期控制在一个月内。少部分产品可能会因订单需求激增而处于生产排期中。我们正在持续扩大生产规模以提升产能。
鸿磐关节电机使用磁编码器,分辨率为每转 65,536 个单位。
是的. 它采用多圈绝对值编码器. 但是, 由于输出端带有减速齿轮, 需要编码器电池来保留多圈位置计数. 支持定制, 可选择电机带或不带编码器电池.
我们的谐波驱动模组采用高精度 16-bit 编码器分辨率,每转可提供 65,536 个离散位置。这意味着完整的 360° 旋转被划分为极其精细的增量,从而在电机端实现卓越的位置精度。
随着大规模制造能力的持续扩展和技术创新的不断推进, HONPINE不仅致力于提供可靠、可规模化生产且具有成本效益的产品, 还旨在加速人形机器人和具身智能机器人的产业化进程。
HONPINE 一体化关节模块将多项核心技术集成到一个紧凑单元中, 包括:
伺服控制
电机驱动
扭矩传感
传动系统
热管理
与传统伺服电机系统相比, HONPINE 解决方案提供:
更高的集成度和更轻的重量
更高的峰值扭矩输出
更高的精度和控制性能
HONPINE 旨在降低客户开发机器人和自动化系统的技术门槛, 实现更快的开发和部署。
HONPINE 在多个领域具备强大的系统级工程能力,包括:
传感技术
能源系统
运动与驱动
工业设计
这种多学科整合显著缩短了人形机器人客户的开发周期,尤其是从概念 (0) 到初始部署 (1)。
HPJM 谐波传动模块采用了不同的安全方案。与其采用STO,我们集成了可靠的内置电磁制动系统,在断电时会自动啮合,使旋转立即停止,从而确保安全运行。
全新2026 HONPINE HAG谐波传动机器人关节电机配备STO功能。联系我们,获取有关HAG系列的更多信息。
核心参数
16位分辨率:每电机转一圈为 65,536 脉冲。
减速比:例如,101:1 表示电机每转 101 圈,输出转一圈。
输出速度
输出速度 = 电机速度 ÷ 减速比。
示例:电机以 1 转/秒(65,536 脉冲/秒)运行,减速比为 101:1 → 输出在 101 秒内完成 1 圈。
单位换算
Rad/s 换算:
1 rad/s ≈ 57.3 °/s
1 rad/s ≈ 9.55 rpm
脉冲/秒 ↔ rpm(16位编码器):
1 rpm ≈ 1092.27 脉冲/秒
1 脉冲/秒 ≈ 1/1092.27 rpm
注意:计算基于物理关系。例如,1 rad/s = 60/(2π) rpm。
中空轴设计允许电缆、气动管路或信号线从中心穿过,减小关节直径,使布线更简单、更可靠。这可显著降低布线复杂度,并提高机器人应用中的整体系统集成度。
谐波关节模组支持机器人关节的旋转运动,并可实现高达 ±0.001° 的重复定位精度。
它在紧凑空间内提供高扭矩密度 (>100 N·m/kg),因此非常适用于以下应用:
人形机器人关节
焊接和搬运机器人
医疗机械
工业自动化设备
电驱动系统
服务机器人及其他机器人系统
谐波关节模组通过谐波减速器的高减速比(通常为 50–160:1)和低背隙(小于 1 arcmin),实现机器人关节的精确位置与扭矩控制。
此外,该模组集成了编码器和扭矩传感器,可实现精度为 ±0.1 N·m 的实时扭矩调节,使其非常适用于柔性和顺应性装配任务。
本质上,一个主控制器可以处理四个模块。虽然正常通信周期为每次传输 0.5ms,但并不能始终稳定维持这一间隔——例如,在报警状态或类似情况下,并不需要进行高频采样。
基于CAN协议,单个电机每次发送和接收需要0.5ms。对于多个电机,这个时间相应累积。
所有模块变体的完整机械规格,包括质量和体积,均可在我们的型号选择手册中获取。请从我们的资源部分下载该手册,或联系我们的销售团队以获取具体的尺寸要求。
由于我们的集成驱动系统采用高度紧凑的设计,HONPINE当前的机器人关节模组不包含通用I/O引脚。这种精简设计可在机器人应用中实现最佳的空间节省。
虽然 HONPINE 标准机器人关节模块不包含集成扭矩测量功能,但我们可以通过集成外部扭矩传感器来满足扭矩检测需求。请联系我们的技术团队以获取定制化解决方案。
行星关节电机 - 常见问题
JRM行星关节电机是鸿磐的一款军工级产品,常用于高性能机器狗。目前,面向人形机器人仿生应用的 HPJM 谐波关节电机即将推出,具有更紧凑的设计和更大的中空腔体。
凭借行星齿轮减速机的固有优势, HONPINE行星减速电机广泛应用于各种机器人领域。
在四足机器人中, 它们满足12个自由度的要求, 为复杂地形中的运动提供稳定而强劲的驱动。
在机械臂中, 高精度行星减速机确保精确定位, 从而能够完成焊接和切割等复杂任务。
在人形机器人中, 行星减速机有助于实现更自然流畅的运动, 显著提高行走、抬臂和姿态转换等动作的协调性和稳定性。
HONPINE行星齿轮电机的内部齿轮采用高强度合金钢制成,经过渗碳和淬火处理,表面硬度达到HRC 58–62。结合食品级润滑脂,在额定运行条件下使用寿命超过10,000小时,相当于在连续工业运行中约14个月无需更换核心部件。
此外,该电机采用模块化密封设计,防护等级达到IP65,可有效抵御灰尘和液体飞溅,适用于食品加工和汽车喷涂等特殊环境。
标准化接口和可拆卸端盖设计使维护时无需拆卸整个机器人——可直接更换模块,显著减少停机时间和维护成本。
从 SCARA 机器人分拣和六轴机械臂上下料等工业应用,到康复训练设备和手术机器人精密控制等医疗应用,再到仿生机器人步态模拟和无人机云台稳定等消费级市场,该模块支持包括 CAN 和 RS485 在内的多种通信协议,可快速兼容不同品牌的控制系统。
更重要的是,轻量化设计与高扭矩密度的结合造就了强大的应用通用性:
小尺寸型号可嵌入无人机云台,在不增加负载的情况下确保 360° 平稳旋转。
较大型号可集成到 AGV 驱动轮中,支持 24 小时连续运行,以满足仓储和物流作业不间断运行的需求。
为满足工业制造对精度的严苛要求,该模组采用斜齿行星齿轮减速结构。通过优化齿面设计,将齿轮背隙控制在 10 arcminutes (approximately 0.167°),实现 ±12 arcminutes 的重复定位精度。
结合 3 kHz 高频控制信号和 ≤200 μs 的响应时间,即使在精密电子元件装配和锂电池极耳焊接等微米级作业中,系统也能避免因延迟或定位误差造成的产品损失。
针对重载应用,该模组采用军工级强化齿轮材料和轴承结构。峰值扭矩最高可达 36 Nm,而堵转扭矩超过 24 Nm,相当于稳定举升 3.6 kg 负载。这为四足机器人负载运动和外骨骼机器人的辅助康复提供了强劲可靠的动力。
HONPINE行星齿轮电机的内部齿轮采用高强度合金钢制成,经过渗碳和淬火处理,表面硬度达到HRC 58–62。结合食品级润滑脂,在额定运行条件下使用寿命超过10,000小时,相当于在连续工业运行中约14个月无需更换核心部件。
此外,该电机采用模块化密封设计,防护等级达到IP65,可有效抵御灰尘和液体飞溅,适用于食品加工和汽车喷涂等特殊环境。
标准化接口和可拆卸端盖设计使维护时无需拆卸整个机器人——可直接更换模块,显著减少停机时间和维护成本。
从 SCARA 机器人分拣和六轴机械臂上下料等工业应用,到康复训练设备和手术机器人精密控制等医疗应用,再到仿生机器人步态模拟和无人机云台稳定等消费级市场,该模块支持包括 CAN 和 RS485 在内的多种通信协议,可快速兼容不同品牌的控制系统。
更重要的是,轻量化设计与高扭矩密度的结合造就了强大的应用通用性:
小尺寸型号可嵌入无人机云台,在不增加负载的情况下确保 360° 平稳旋转。
较大型号可集成到 AGV 驱动轮中,支持 24 小时连续运行,以满足仓储和物流作业不间断运行的需求。
为满足工业制造对精度的严苛要求,该模组采用斜齿行星齿轮减速结构。通过优化齿面设计,将齿轮背隙控制在 10 arcminutes (approximately 0.167°),实现 ±12 arcminutes 的重复定位精度。
结合 3 kHz 高频控制信号和 ≤200 μs 的响应时间,即使在精密电子元件装配和锂电池极耳焊接等微米级作业中,系统也能避免因延迟或定位误差造成的产品损失。
针对重载应用,该模组采用军工级强化齿轮材料和轴承结构。峰值扭矩最高可达 36 Nm,而堵转扭矩超过 24 Nm,相当于稳定举升 3.6 kg 负载。这为四足机器人负载运动和外骨骼机器人的辅助康复提供了强劲可靠的动力。
精密传动行业新闻
在这里你可以了解到鸿磐一体化关节模组和其它精密传动减速设备相关的行业信息。





