机器人灵巧手
 高精度遥操作机械外骨骼手套鸿磐 EG机械外骨骼手套是一款专用于高精度手部动作捕捉与辅助控制的外骨骼手套产品。该手套配备核心磁编码器技术,不仅可实现高精度的手部关节角度检测,还能消除位置漂移。此外,通过集成ESP-NOW无线传输技术与动态映射标定算法,可实现灵巧手的高精度遥操作。目前,该产品已广泛适用于工业制造、医疗康复、科学研究等领域,满足多样化场景的实际应用需求。详情
高精度遥操作机械外骨骼手套鸿磐 EG机械外骨骼手套是一款专用于高精度手部动作捕捉与辅助控制的外骨骼手套产品。该手套配备核心磁编码器技术,不仅可实现高精度的手部关节角度检测,还能消除位置漂移。此外,通过集成ESP-NOW无线传输技术与动态映射标定算法,可实现灵巧手的高精度遥操作。目前,该产品已广泛适用于工业制造、医疗康复、科学研究等领域,满足多样化场景的实际应用需求。详情 用于 VR AR 远程操作的智能机器人遥操作手套鸿磐 遥操作手套是一款为智能机器人和远程控制应用而设计的高精度手部动作捕捉设备。基于先进的动作捕捉技术和公司自主研发的动态映射算法,该手套可实现对灵巧手的精确控制。通过实时捕捉和传输手部动作,用户能够自然、直观地操作机械手,满足远程操作、虚拟现实 (VR)、增强现实 (AR) 和智能制造等多种应用场景的需求。详情
用于 VR AR 远程操作的智能机器人遥操作手套鸿磐 遥操作手套是一款为智能机器人和远程控制应用而设计的高精度手部动作捕捉设备。基于先进的动作捕捉技术和公司自主研发的动态映射算法,该手套可实现对灵巧手的精确控制。通过实时捕捉和传输手部动作,用户能够自然、直观地操作机械手,满足远程操作、虚拟现实 (VR)、增强现实 (AR) 和智能制造等多种应用场景的需求。详情- 高精度控制 21-自由度工业灵巧仿人手鸿磐 L30 是一款 21-自由度灵巧手,能够以毫米级操作精度精准复现人手精细动作。它采用先进的腱绳驱动和高度集成的机电一体化系统,实现稳定运动和精确控制,并支持多模态感知(力、触觉、视觉),以增强实时感知和交互可靠性。凭借高自由度、多模态感知和领先的运动控制算法,广泛应用于工业自动化、医疗辅助和科研实验——提供高度适应、可靠的末端执行器解决方案。详情
- 高精度 21 自由度仿人自然抓握灵巧手鸿磐 L20 是一款 21 自由度灵巧手,能够精准模拟人手自然抓握并实现精细操作。它采用创新的连杆传动和自主研发电机,实现高精度运动,并支持力觉、视觉和触觉传感器——通过多模态感知增强环境适应性和智能交互能力。凭借高自由度、多模态感知以及力位混合算法,广泛应用于教育与科研、工业自动化、家庭辅助和养老护理——提供精准灵巧的操作解决方案。详情
- 高性能精密控制机器人仿生灵巧手鸿磐 机器人手 L10 是一款具有 20 个自由度的高性能灵巧手。配备自研电机和连杆传动机构,在确保牵引稳定性的同时,实现精准控制与流畅运动。广泛应用于教育科研、钢琴演奏、家居辅助和养老护理等领域,推动智能机器人与人机协作的发展和落地。它支持通过各种传感器进行多模态
环境感知,并兼容 ROS/QT 环境(配备标准 ROS 插件,支持二次开发)。详情  适用于机器人系统的高性能17自由度灵巧手鸿磐 07机械手是一款具有17自由度的高性能灵巧手。采用自主研发电机驱动,兼顾成本控制与可靠的抓取和操作性能,可满足多样化应用需求。提供ROS插件以支持二次开发,适用于教育与科研、辅助抓取及智能交互——为机器人系统提供高效、经济的灵巧手解决方案。详情
适用于机器人系统的高性能17自由度灵巧手鸿磐 07机械手是一款具有17自由度的高性能灵巧手。采用自主研发电机驱动,兼顾成本控制与可靠的抓取和操作性能,可满足多样化应用需求。提供ROS插件以支持二次开发,适用于教育与科研、辅助抓取及智能交互——为机器人系统提供高效、经济的灵巧手解决方案。详情- 高精度紧凑型高抓握力仿生灵巧手鸿磐 O6 仿生灵巧手具有 6 个主动关节和 5 个被动关节。其具备高抓握力、精确的力度控制、紧凑尺寸和轻量化设计。特别适用于物流搬运、工业装配以及异形物体抓取等应用场景。详情
- 仿人手指关节设计机器人灵巧手机器人灵巧手是一种高度模仿人手的机器人末端执行器。它采用五指仿人结构设计,通过超过 15 个自由度模拟人手关节运动,实现抓握、捏取等精细操作。它是机器人执行复杂任务的核心部件。它属于机器人末端执行器中的夹持器类设备。不同于传统的两指夹爪,它具备多模态感知和智能控制能力,能够适应不规则物体并完成精密操作任务。详情








电动夹爪
 HONPINE WEPG 系列食品行业称重电动夹爪HONPINE WEPG 系列称重电动夹爪目前包括 WEPG01, WEPG05, WEPG-T08, 和 WEPG-T15 型号, 分别覆盖 1 kg, 5 kg, 8 kg, 和 15 kg 的最大负载. 该系列充分满足锂电池生产的重量要求, 并覆盖大多数工业称重应用.
HONPINE WEPG 系列食品行业称重电动夹爪HONPINE WEPG 系列称重电动夹爪目前包括 WEPG01, WEPG05, WEPG-T08, 和 WEPG-T15 型号, 分别覆盖 1 kg, 5 kg, 8 kg, 和 15 kg 的最大负载. 该系列充分满足锂电池生产的重量要求, 并覆盖大多数工业称重应用.
除在锂电池制造产线中被广泛采用外, WEPG 系列也已成功应用于汽车, 制药, 和食品加工行业, 在多个领域拥有标杆客户. 该系列还支持面向多场景称重应用的定制化解决方案.详情 HONPINE EPG-FLEX 系列精密制造用电动平行夹爪随着小批量, 多品种柔性制造的兴起, 自动化设备的快速重构已变得至关重要. 传统固定设计的电动夹爪往往难以应对生产工艺和应用场景的频繁变化.
HONPINE EPG-FLEX 系列精密制造用电动平行夹爪随着小批量, 多品种柔性制造的兴起, 自动化设备的快速重构已变得至关重要. 传统固定设计的电动夹爪往往难以应对生产工艺和应用场景的频繁变化.
HONPINE EPG-FLEX Series 电动平行夹爪正是为满足这一需求而设计, 基于模块化标准化与柔性配置理念. 作为 HONPINE 电动夹爪产品组合中的先进升级产品, EPG-FLEX Series 可为复杂工业自动化环境提供更具适应性的解决方案.
该系列已在 3C 电子行业多类型部件装配, 新能源产线多工位切换, 以及半导体制造辅助物料搬运等应用中展现出强劲性能.详情 轻松替代气动夹爪的工业自动化电动平行夹爪HONPINE EPG-ST 系列电动平行夹爪旨在作为传统气动夹爪在拾放和物料搬运应用中的高性价比替代方案. 通过集成电机, 驱动器和控制器, 它们无需改造现有生产线, 即可直接替代相同尺寸的气动夹爪. 与气动解决方案相比, EPG-ST 系列可减少压缩空气消耗, 简化安装与操作, 并提供更高的控制能力和可靠性. 该系列已在3C电子装配, 新能源电池搬运和生命科学实验室等应用中得到验证, 为加速从气动自动化向电动自动化转型提供高效, 易用的解决方案.详情
轻松替代气动夹爪的工业自动化电动平行夹爪HONPINE EPG-ST 系列电动平行夹爪旨在作为传统气动夹爪在拾放和物料搬运应用中的高性价比替代方案. 通过集成电机, 驱动器和控制器, 它们无需改造现有生产线, 即可直接替代相同尺寸的气动夹爪. 与气动解决方案相比, EPG-ST 系列可减少压缩空气消耗, 简化安装与操作, 并提供更高的控制能力和可靠性. 该系列已在3C电子装配, 新能源电池搬运和生命科学实验室等应用中得到验证, 为加速从气动自动化向电动自动化转型提供高效, 易用的解决方案.详情 高精度 ZR 直线旋转旋转执行器直线旋转执行器(亦称 ZR 执行器)是一种高度集成的二维运动模组,结合了直线升降(Z 轴)和 360° 旋转(R 轴)功能。它采用直线电机实现精密直线运动,并由伺服电机驱动旋转运动。通过组合两个轴,可执行升降、旋转和角度校准等同步复合动作。非常适用于半导体芯片贴装和精密装配等高精度应用。详情
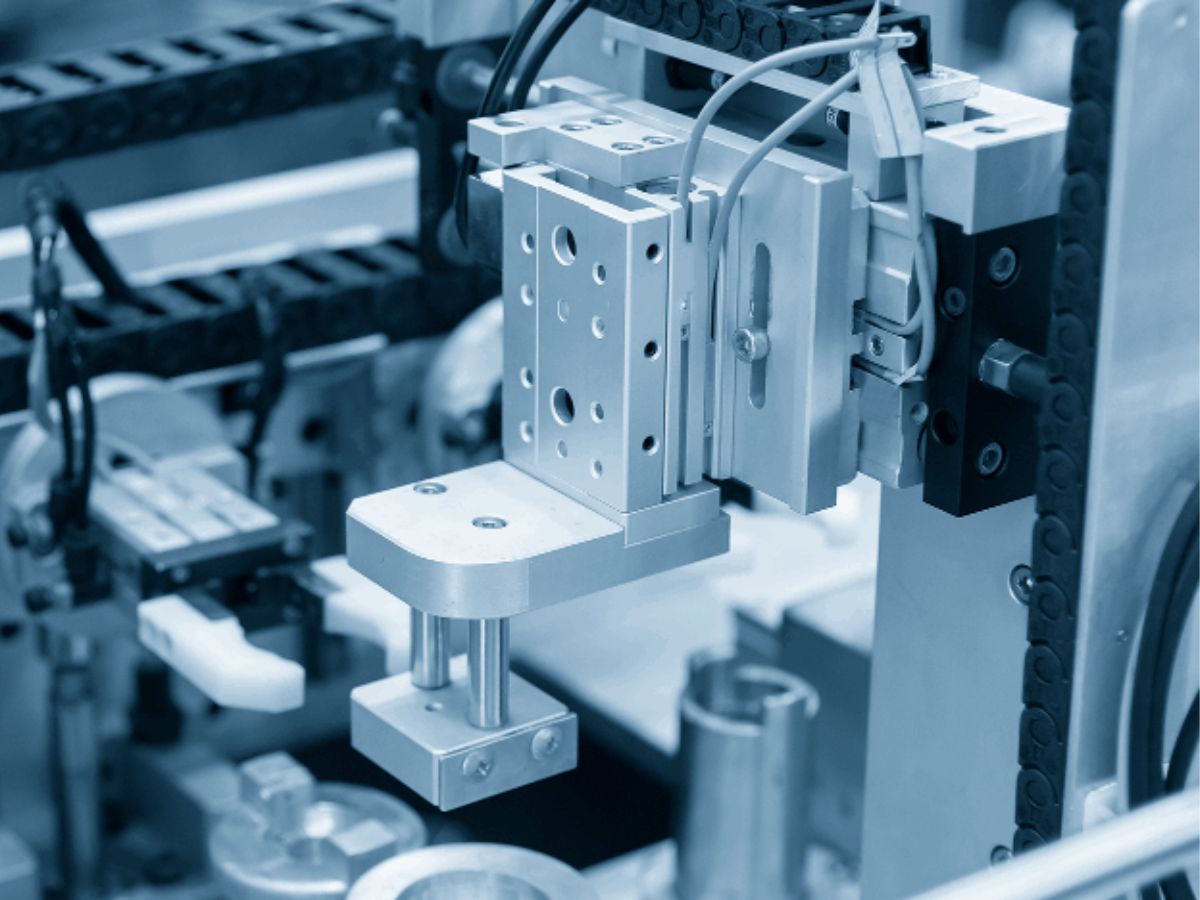
高精度 ZR 直线旋转旋转执行器直线旋转执行器(亦称 ZR 执行器)是一种高度集成的二维运动模组,结合了直线升降(Z 轴)和 360° 旋转(R 轴)功能。它采用直线电机实现精密直线运动,并由伺服电机驱动旋转运动。通过组合两个轴,可执行升降、旋转和角度校准等同步复合动作。非常适用于半导体芯片贴装和精密装配等高精度应用。详情 工业智能机器人伺服电动夹爪机器人电动夹爪是一种由伺服电机驱动的智能末端执行器,专为工业自动化场景设计,可在机器人末端实现精确的物料抓取、搬运和装配。其核心由电机、减速机构、传感器和控制系统组成,支持毫米级到微米级精度的自适应抓取,适用于电子元件、医疗设备、精密零件等微小工件的柔性生产。详情
工业智能机器人伺服电动夹爪机器人电动夹爪是一种由伺服电机驱动的智能末端执行器,专为工业自动化场景设计,可在机器人末端实现精确的物料抓取、搬运和装配。其核心由电机、减速机构、传感器和控制系统组成,支持毫米级到微米级精度的自适应抓取,适用于电子元件、医疗设备、精密零件等微小工件的柔性生产。详情 360°精密控制电动旋转夹爪末端执行器电动旋转夹爪是一种集抓取与旋转功能于一体的机电一体化末端执行器。它通过内置伺服电机驱动齿轮或同步带机构,在工件抓取过程中实现同步旋转(如拧瓶盖和齿轮装配)。其核心由电机、减速机、夹爪机构和控制器组成。支持360°无死角旋转及旋转角度精密控制,适用于自动化装配线、实验室仪器操作等场景。详情
360°精密控制电动旋转夹爪末端执行器电动旋转夹爪是一种集抓取与旋转功能于一体的机电一体化末端执行器。它通过内置伺服电机驱动齿轮或同步带机构,在工件抓取过程中实现同步旋转(如拧瓶盖和齿轮装配)。其核心由电机、减速机、夹爪机构和控制器组成。支持360°无死角旋转及旋转角度精密控制,适用于自动化装配线、实验室仪器操作等场景。详情 快速稳定机器人电动平行夹爪电动平行夹爪是一种创新型机器人末端执行器,通过精密电机驱动和传动机构实现对物体的快速稳定夹持。其夹持手指在平面内平行移动,最大可调行程为0-180mm,单指夹持力为2N~800N。它采用先进的电机技术和人工智能算法,可在各种复杂环境中自动调整夹持方式,以适应不同物体的形状、尺寸和位置。该设备无需外部气源,结构紧凑,支持多种安装方式,适合在小空间内部署。详情
快速稳定机器人电动平行夹爪电动平行夹爪是一种创新型机器人末端执行器,通过精密电机驱动和传动机构实现对物体的快速稳定夹持。其夹持手指在平面内平行移动,最大可调行程为0-180mm,单指夹持力为2N~800N。它采用先进的电机技术和人工智能算法,可在各种复杂环境中自动调整夹持方式,以适应不同物体的形状、尺寸和位置。该设备无需外部气源,结构紧凑,支持多种安装方式,适合在小空间内部署。详情







微型电动缸

电动真空吸盘
 EVS 系列工业自动化码垛用电动真空执行器HONPINE EVS 系列电动真空执行器是一款结构紧凑且节能的 EOAT 解决方案, 专为取放, 码垛和物料搬运等工业自动化应用而设计.
EVS 系列工业自动化码垛用电动真空执行器HONPINE EVS 系列电动真空执行器是一款结构紧凑且节能的 EOAT 解决方案, 专为取放, 码垛和物料搬运等工业自动化应用而设计.
其重量仅为 2.5 kg, 负载能力最高可达 10 kg, 以轻量化结构实现强劲性能. 采用 24 V 低压系统供电, 可将能耗降低至传统气动系统的约 20%, 帮助降低运营成本.
EVS 可根据不同工件将吸附力调节范围设定为 102 N 至 510 N. 其紧凑设计相比气动解决方案小 30%, 适用于空间受限的机器人应用.
凭借直接安装于机器人, 实时真空反馈和智能监测功能, EVS 可确保自动化生产线稳定, 高效且可靠运行.详情 机器人电动真空吸盘机器人电动真空吸盘是一种基于真空吸附原理、由电力驱动的末端执行器。它利用内置真空泵产生负压来抓取物体,可有效替代传统的人工搬运方式。其核心设计集成了智能控制系统和多层密封结构,适用于搬运瓷砖、石板和玻璃等表面光滑或略微粗糙的材料。详情
机器人电动真空吸盘机器人电动真空吸盘是一种基于真空吸附原理、由电力驱动的末端执行器。它利用内置真空泵产生负压来抓取物体,可有效替代传统的人工搬运方式。其核心设计集成了智能控制系统和多层密封结构,适用于搬运瓷砖、石板和玻璃等表面光滑或略微粗糙的材料。详情


机器人灵巧手- 常见问题
被动自由度(DoF):
这些自由度不是由电机直接驱动的。相反,运动通过齿轮、腱索或连杆等机械元件传递,从而实现由外力或耦合关节驱动的自适应运动。
主动自由度(DoF):
这些自由度由电机直接自动控制,可实现精确、可编程的运动和力控制。
机械手本身并未集成内置视觉传感器。不过,可以增加外部视觉模块以实现视觉感知。
对于触觉感知,则需要采用电容式或压阻式(电阻式)传感垫,用于检测接触、压力和交互力。
压阻式和电容式传感器的规格将根据您的具体产品配置和选型要求提供。
是的,我们提供遥操作手套,而且其价格比市场上大多数替代产品更具竞争力。
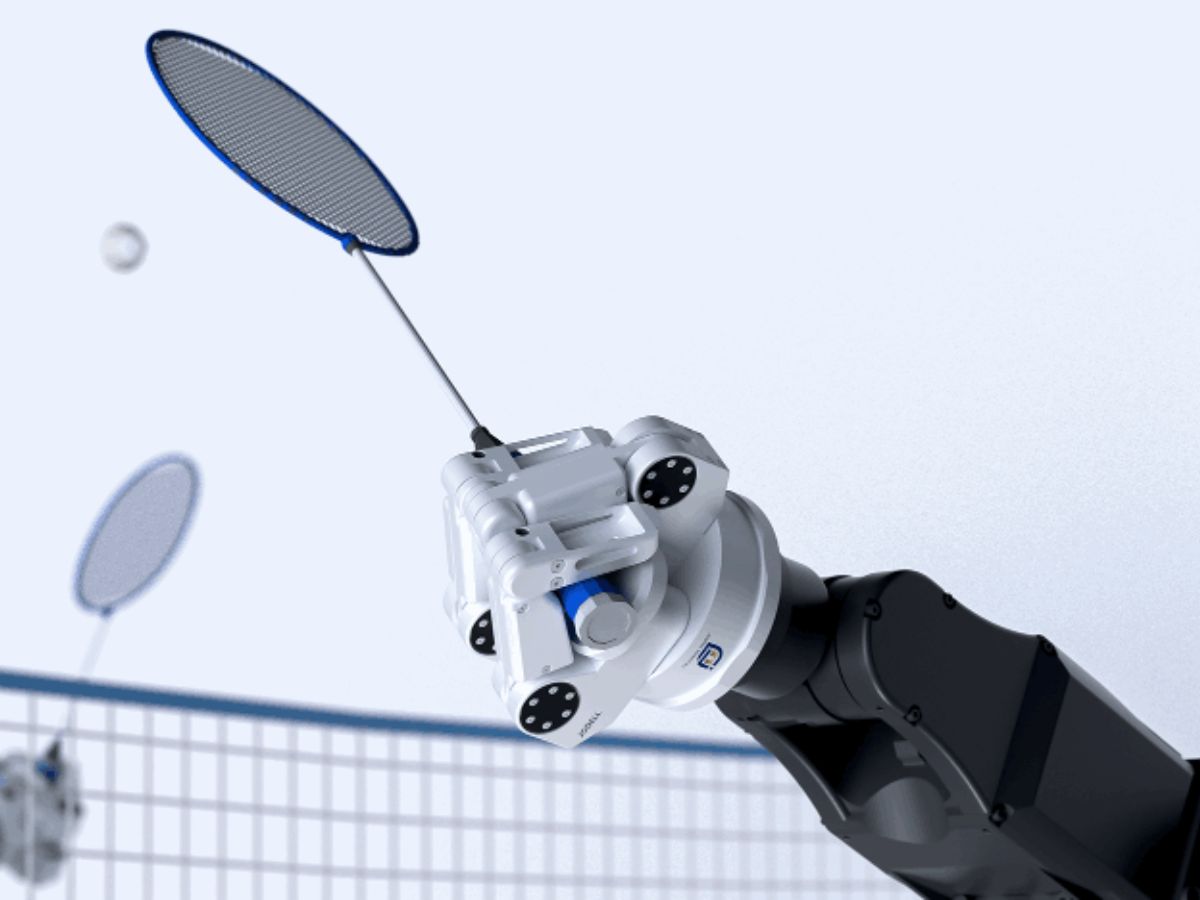
新一代模块化人形灵巧手, Linker Hand L30, 整只手具有 22 个自由度, 深度融合了仿生学原理与先进机电一体化技术。
在实现高度拟人化设计的同时, 它还具备高精度控制和实时感知能力。核心关节速度超过 400°/s, 整手张开或闭合仅需 0.2 秒即可完成。
其高速运动性能和精准操控在现场演示中给观众留下了深刻印象。
通过采用仿生肌腱驱动结构,高精度扭矩控制和快速动态响应,HONPINE 灵巧手展现出卓越的精细操作能力。
它们充分体现了多自由度协同和力控感知的技术优势,实现了精准,稳定,灵巧的机器人手部操作。
HONPINE的灵巧手通过自主研发的低成本驱动模块结合开源算法框架,在性能与成本之间实现了最佳平衡。
这还得到了中国成熟供应链生态系统的进一步支持。此外,在工业和医疗场景中的广泛应用提供了丰富的真实世界数据,用于快速技术迭代。综上,这些因素共同构成了打造具有全球竞争力的“中国技术解决方案”的核心基础。
新一代模块化人形灵巧手, Linker Hand L30, 整只手具有 22 个自由度, 深度融合了仿生学原理与先进机电一体化技术。
在实现高度拟人化设计的同时, 它还具备高精度控制和实时感知能力。核心关节速度超过 400°/s, 整手张开或闭合仅需 0.2 秒即可完成。
其高速运动性能和精准操控在现场演示中给观众留下了深刻印象。
HONPINE的灵巧手通过自主研发的低成本驱动模块结合开源算法框架,在性能与成本之间实现了最佳平衡。
这还得到了中国成熟供应链生态系统的进一步支持。此外,在工业和医疗场景中的广泛应用提供了丰富的真实世界数据,用于快速技术迭代。综上,这些因素共同构成了打造具有全球竞争力的“中国技术解决方案”的核心基础。
通过采用仿生肌腱驱动结构,高精度扭矩控制和快速动态响应,HONPINE 灵巧手展现出卓越的精细操作能力。
它们充分体现了多自由度协同和力控感知的技术优势,实现了精准,稳定,灵巧的机器人手部操作。
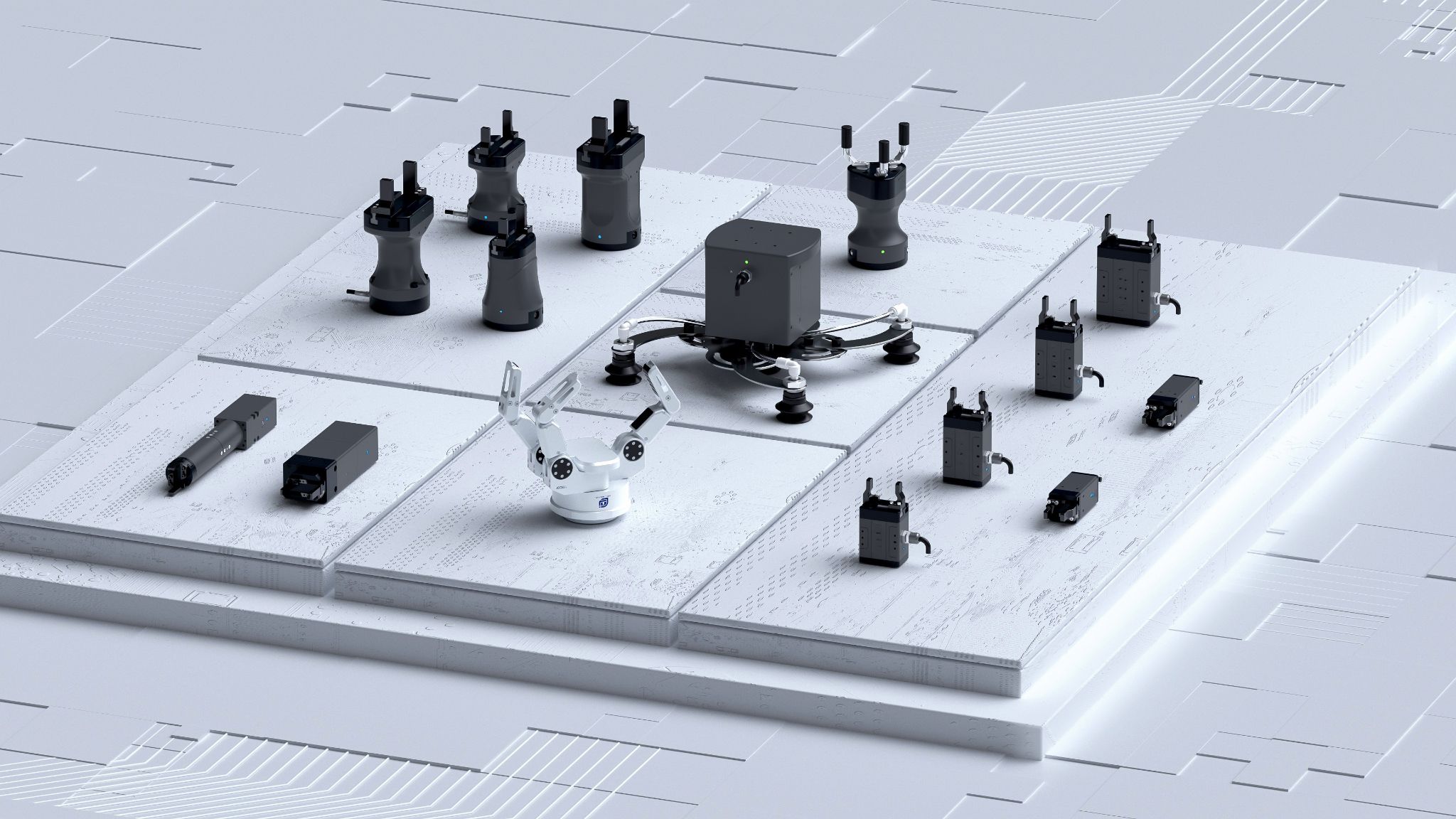
机器人末端执行器的应用
机器人末端执行器提供九大系列,包括工业灵巧手、智能电动夹爪、电动吸盘,以及面向医疗自动化、锂电池、3C、半导体和食品行业的多功能型号。我们的执行器设计紧凑,确保高精度、高刚性和超长行程,并具备
精准的力控制。它们支持网络化应用,安装便捷,操作简单——可为多样化生产需求提供安全、高效的自动化解决方案。
‹


›






